This article is part of Apollo: A Lunar Legacy, a multi-part series that explores the technological advances behind Apollo 11, their influence on modern day space exploration, and what’s next for the moon.
The mere thought that mankind has not only walked on that pale moon we see in the sky every night, but also driven around up there is truly mind-boggling. As we celebrate the 50th anniversary of the first moon landing and look at the technology utilized in the Apollo missions, we would be woefully remiss to pass over the Lunar Roving Vehicle (LRV), or as it is more affectionately known, the moon buggy.
Although the historic Apollo 11 mission made do with a 2.5-hour walkabout on the lunar surface, Apollo missions 15, 16, and 17 each had their own lunar buggy to drive around the moon’s powdery surface. The tale of their creation and deployment is a fascinating one. In fact, the more you learn about NASA’s moon buggy, the more interesting it becomes.

The 17-month turnaround
The original brief about some kind of motorized lunar vehicle called for a pressurized and self-contained 4-ton monster to be transported to the moon in a separate Saturn V rocket. The intent was for two astronauts and their instruments and expendables to be able to live inside the rover for up to two weeks at a time. This ambitious plan even won NASA approval and a contract to begin testing. Cooler and more budget-minded heads prevailed, however, and the entire second rocket system was scrapped in favor of an all-in-one mission.
There were only 17 months left to design and test the small lunar buggy before the deadline
Because of the last-minute change to vehicle size and how many rockets the astronauts would use, there were only 17 months left to design and test the small lunar buggy before the deadline. Several companies bid on this small rover contract, including Chrysler. Just think about that — the first K-car in existence could have been on the moon.
In the end, Boeing won out and its team got down to work. What they delivered within those 17 short months was nothing short of an astounding feat of engineering brilliance. The team presented a light, simple electric vehicle that could withstand extreme temperature fluctuations between -328 and 392 degrees Fahrenheit.

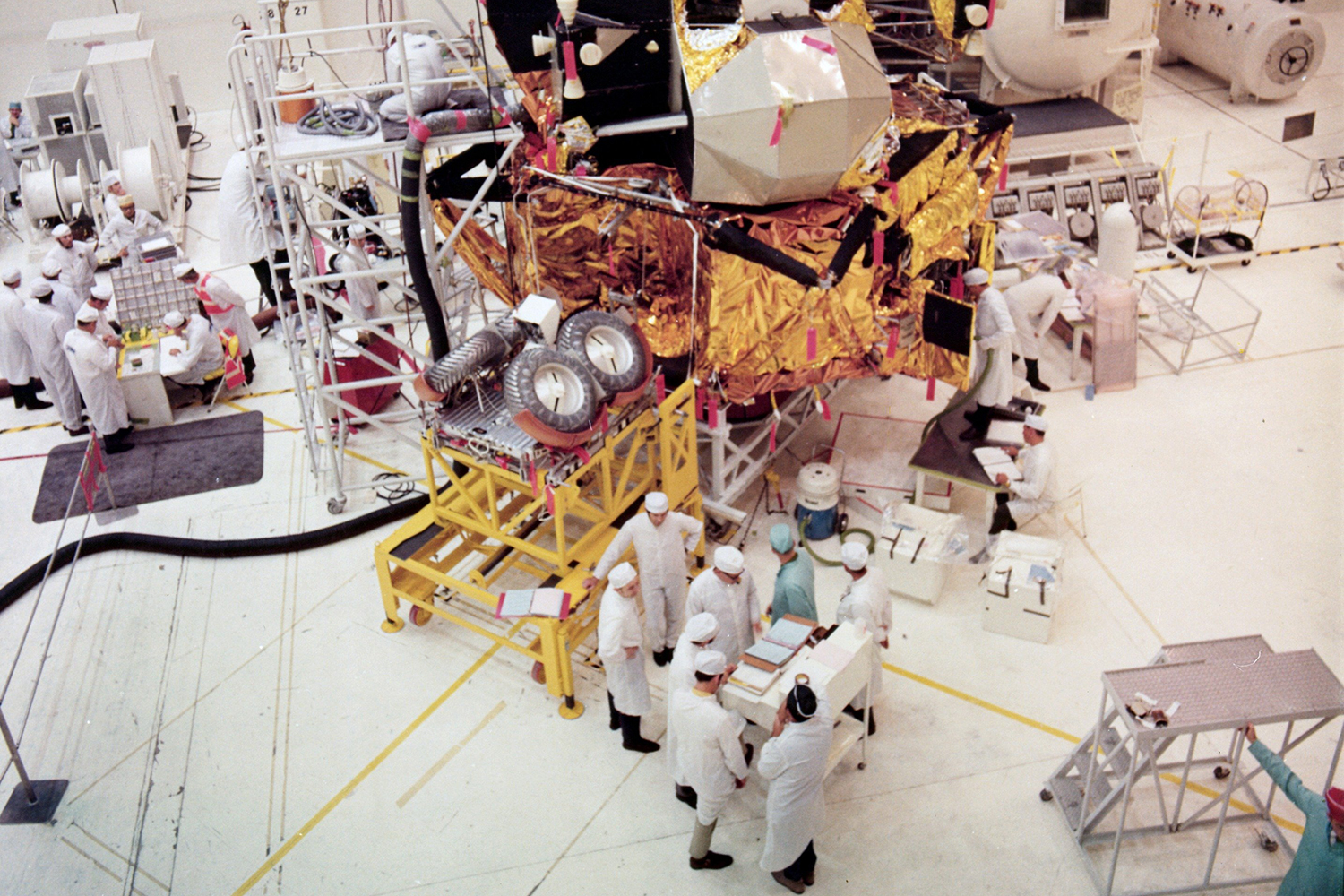
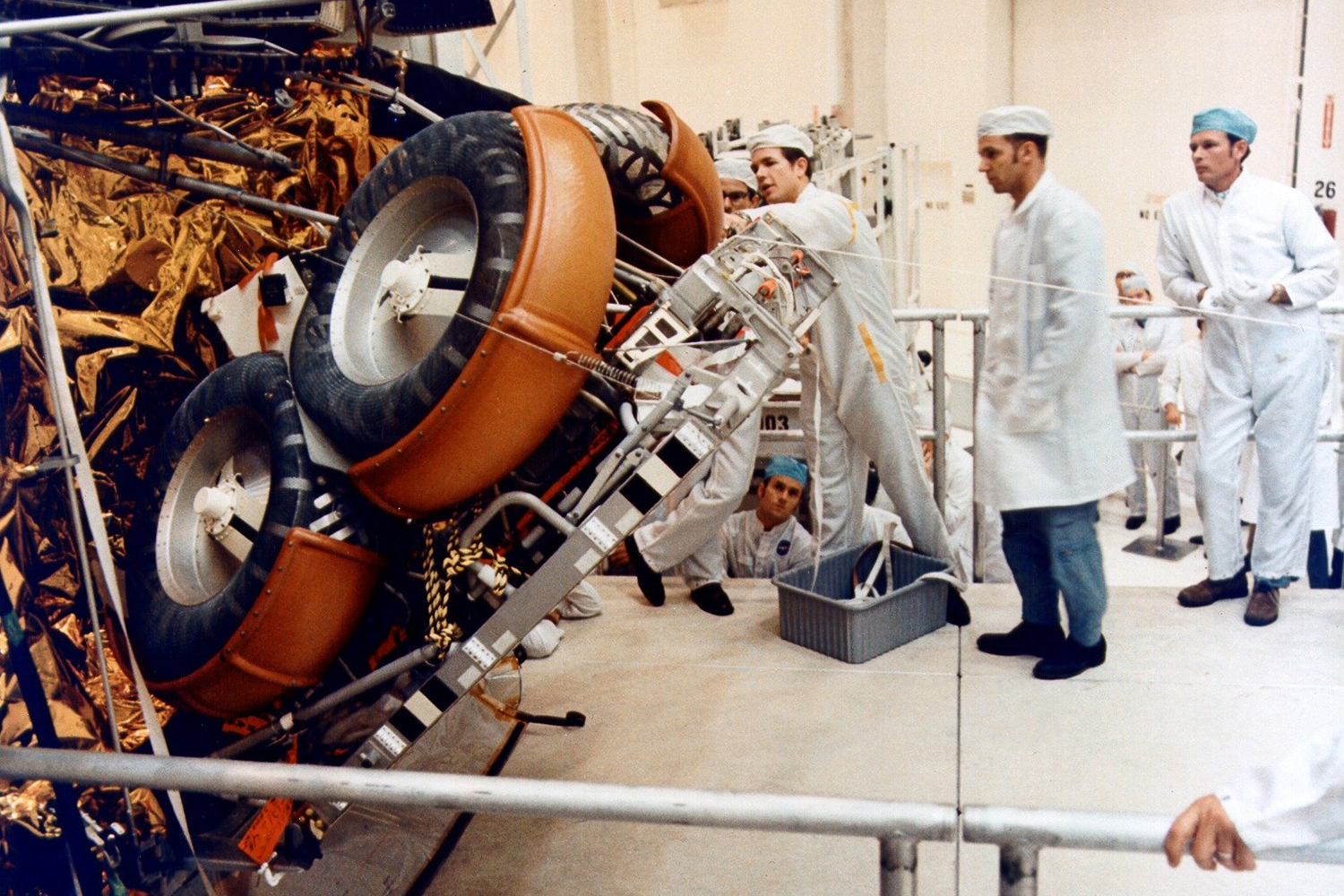
The LRV now had to fit within the existing lunar module, which only had the rough equivalent of a small dinner table’s worth of space for the vehicle. And the rover still had to carry two astronauts, their gear, and rock and soil samples from the surface. The solution to this astronomical Rubik’s cube was to turn a 10-foot lunar vehicle into origami.
The Boeing engineers were able to craft a system that would allow astronauts wearing bulky and fragile pressure suits to deploy a fully functional lunar rover on the surface of another planet with only the simple tug of two steel cables. You really have to watch it below to see for yourself:
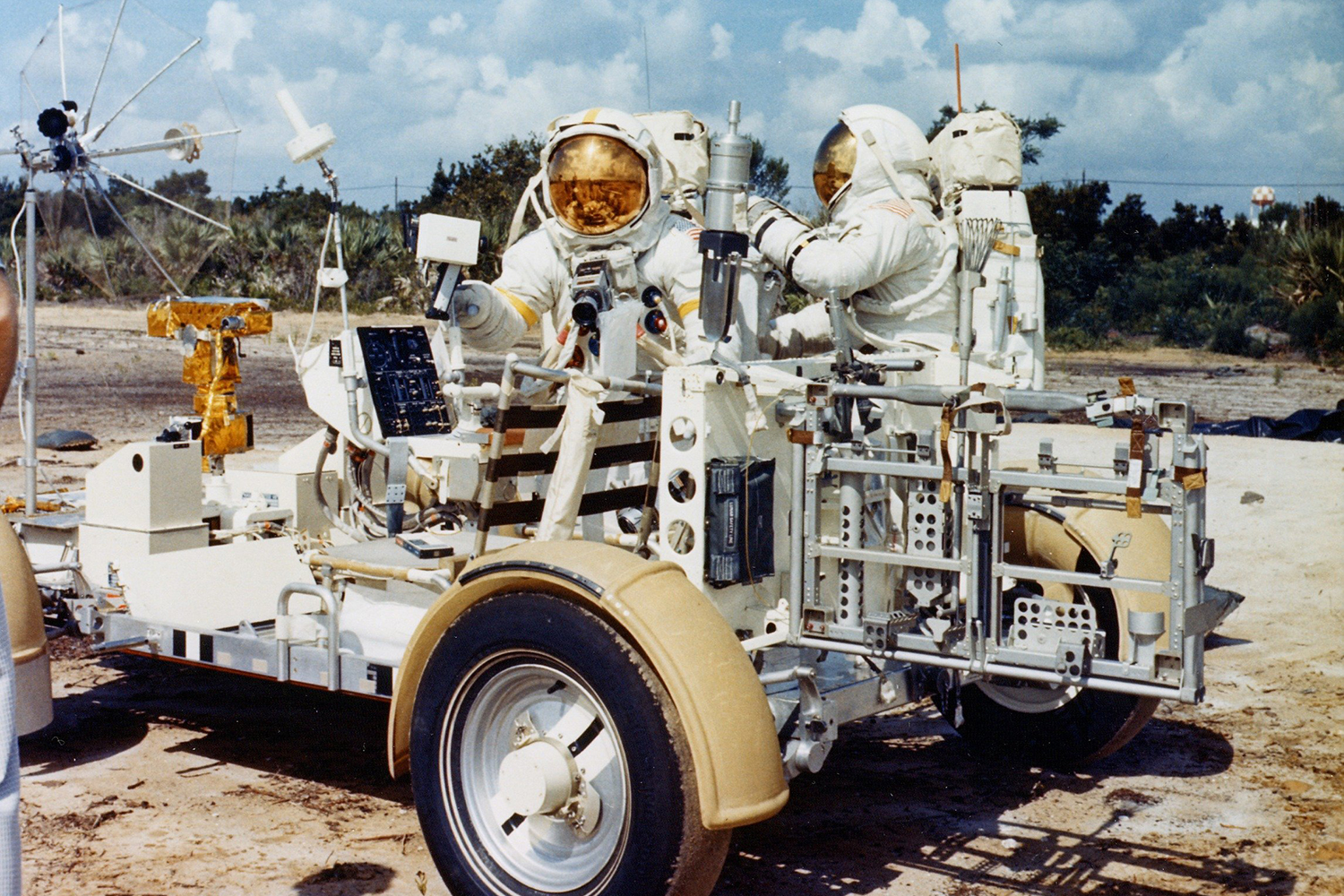
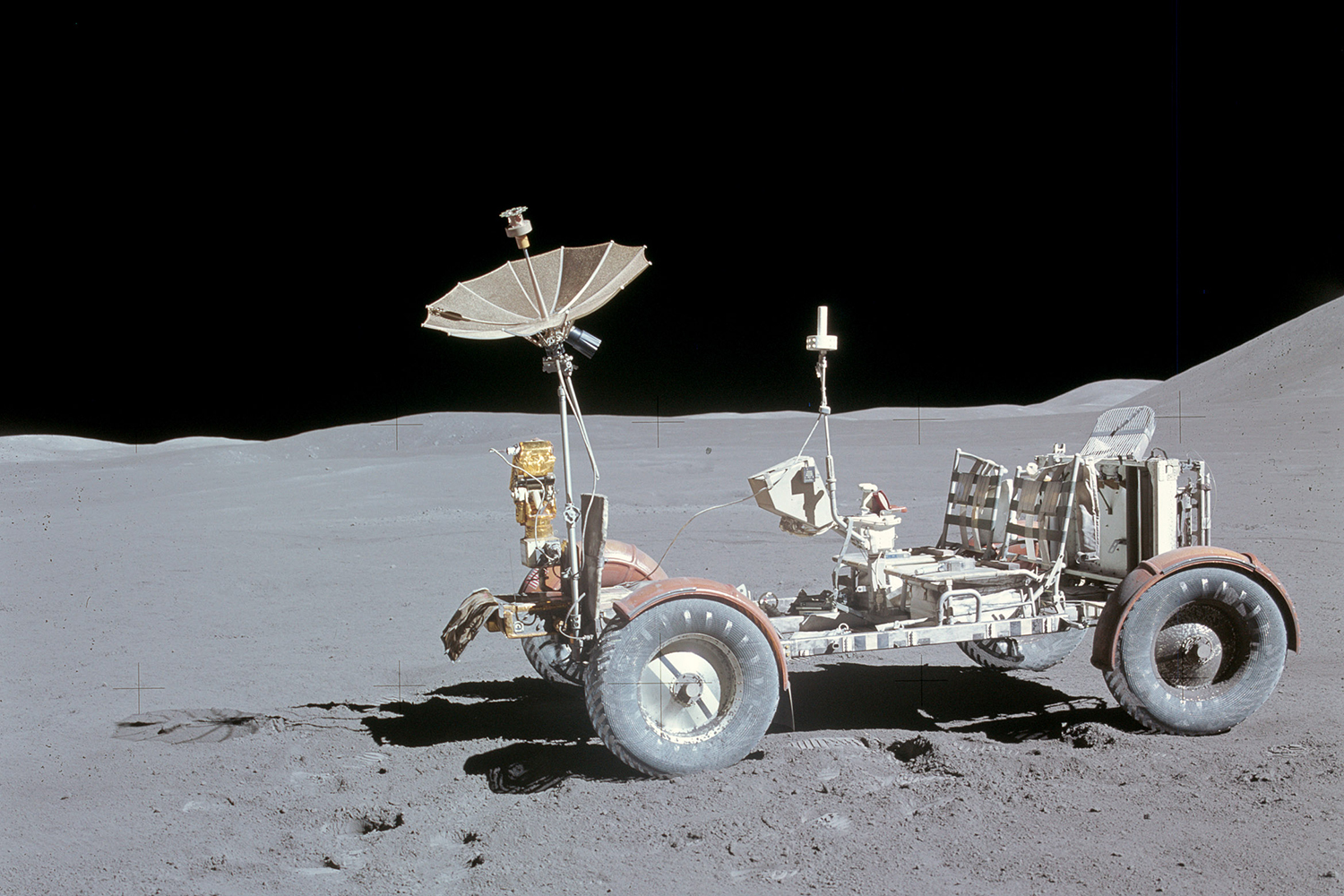
Once on the lunar surface, it was time to start buggy-blasting! The LRV crew consisted of the mission commander as the driver and a navigator. These two would undo some cloth tape to unfold their seats, footrests, the onboard camera, and the radio antenna before climbing aboard to explore the great gray wonder.
Speed records and specs
The buggy was fully electric, with a motor in each wheel that had a neck-snapping 0.25 horsepower each. That power was transferred to the lunar soil through steel mesh and titanium “tires.” Top speed was 8 miles per hour, but during Apollo 17, mission control verified that Eugene Cernan hit 11 mph, giving him the current moon speed record. All four wheels could turn — providing an incredibly tight turning radius — and be powered individually as needed, giving the craft one-wheel drive, two-wheel drive, and four-wheel drive depending on the situation. Generally, the craft was engaged with four-wheel drive. Full range on the two 36-volt silver-zinc batteries was 57 miles, though the maximum distance ever traveled on an LRV was 22.3 miles during Apollo 17.
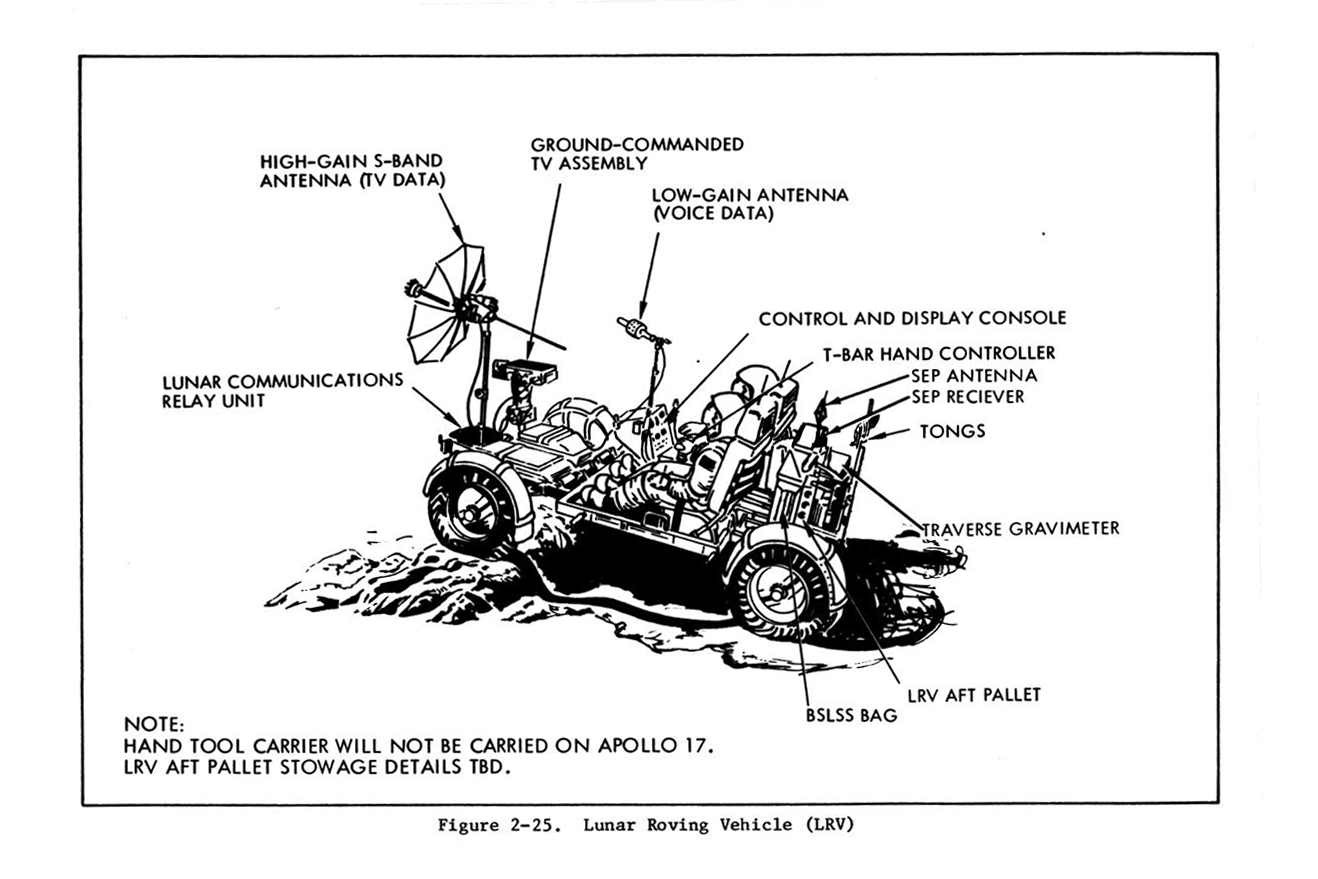
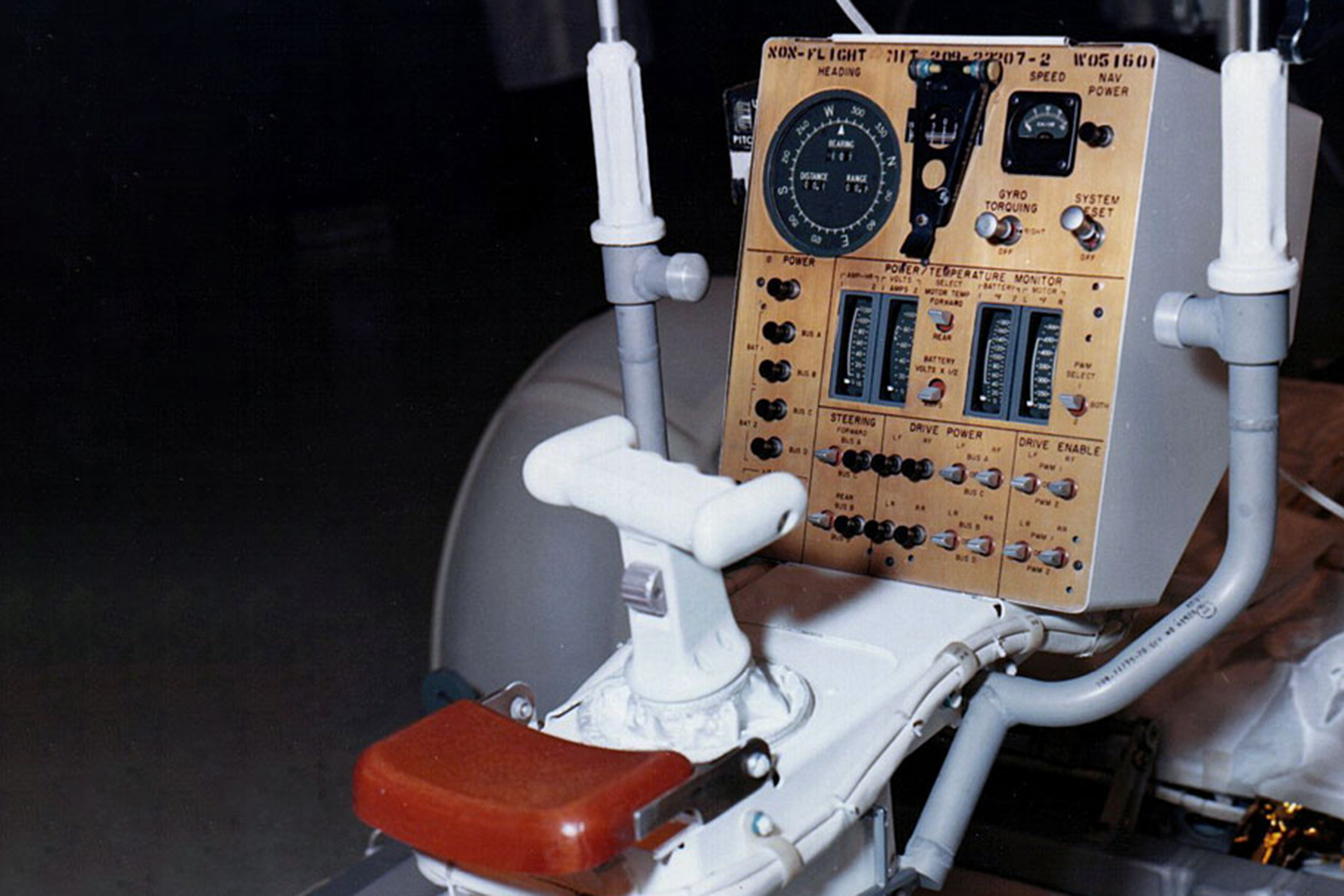
The craft was controlled by a T-shaped joystick and navigated using a directional gyroscope paired with an odometer and a modified sundial as backup. Because no high-resolution maps of the moon’s surface existed at the time, it was impossible to give the astronauts maps by which they could navigate. Instead, the teams were given maps showing features that NASA knew about, and the buggy recorded every rotation and adjustment each wheel made to create a way for the mission commander to backtrack the way to the lunar module. The three teams of astronauts were less than impressed with the maps — apparently, they didn’t line up with anything they were seeing — yet the backtracking system was able to get them to within 100 meters of their starting point each time.


All three lunar roving vehicles were operated with no major errors or malfunctions during their time carting the astronauts about. The most frequent issue was with fender extensions breaking easily. During Apollo 16, the LRV had that part break off after an astronaut bumped into it. Driving around without the extension caused masses of fine lunar dust to cover the astronauts and the batteries. This layer of silt caused the temperature of the battery to spike and range to fail more rapidly. The crew made it back to the lunar module with plenty of juice to spare, however. Again, during Apollo 17, an astronaut bumped into a fender extension and broke it off. Having learned about how terrible the dust became during Apollo 16’s fender malfunction, the Apollo 17 team made an impromptu fix using their map, duct tape, and a pair of clamps.
At the end of each of the three lunar missions to include an LRV, the buggy would be driven away from the lander and parked so the onboard camera could capture the lunar module as it ascended back into space. To this day, there are three lunar buggies sitting on the surface of the moon, ready to give any would-be adventurer the drive of a lifetime.



