For many folks, the word “hammer” summons up distinctly 1990s images of baggy hip-hop pants and rapper-dancers going broke. There is nothing retro about Harvard University’s HAMR robot, however. An acronym derived from “Harvard Ambulatory MicroRobot,” it’s a cutting-edge, insect-inspired robot that can scamper along the ground at an impressive speed of a little under four times its own body lengths every second.
Unlike previous versions of the robot that Harvard has built, its latest iteration — the HAMR-F — no longer has to be tethered to a power source in order to function. While that makes it a little slower than its predecessor, it also opens up new possibilities in terms of freedom of movement.
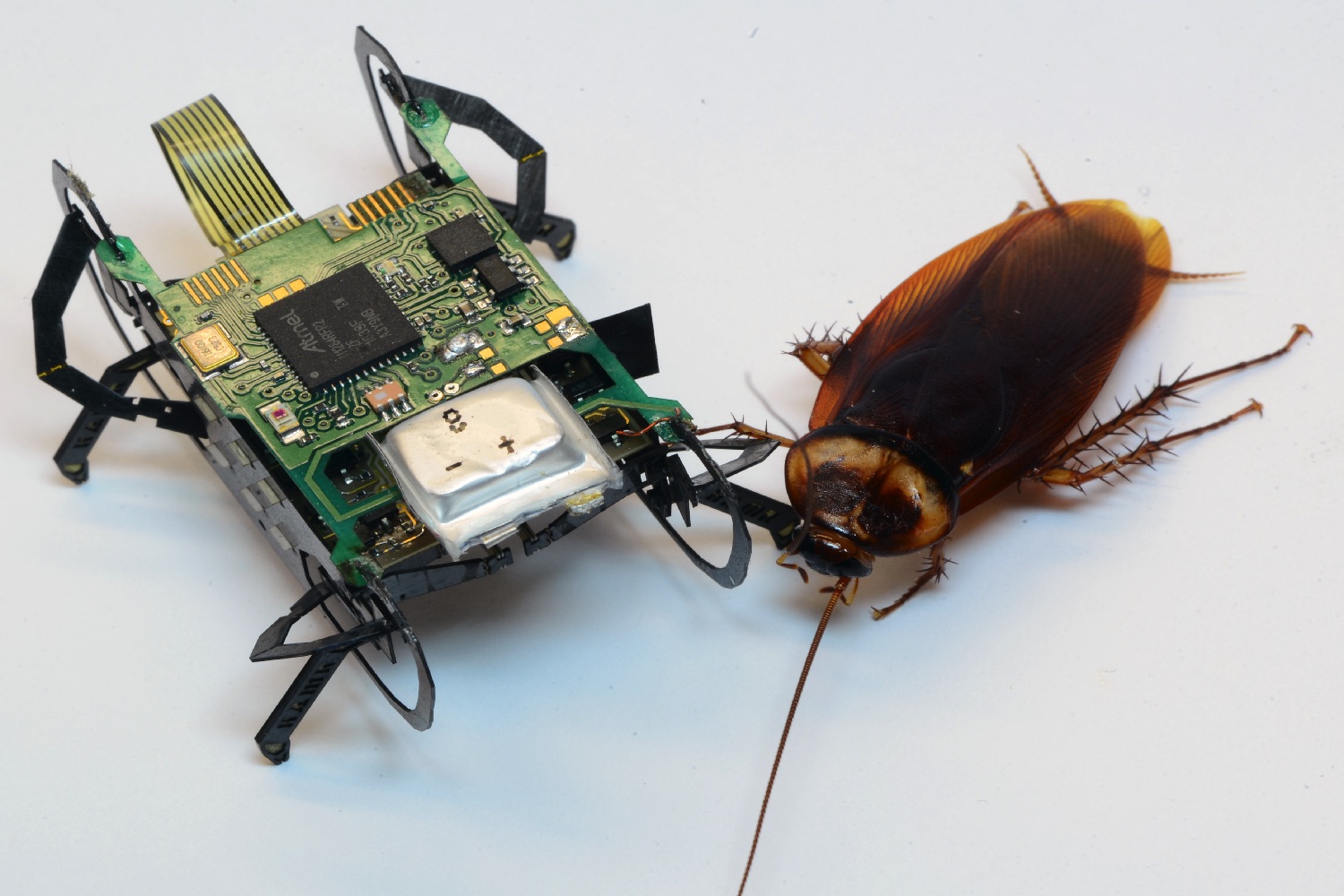
“The Harvard Ambulatory MicroRobot is a quadrupedal robot that is inspired by cockroaches, having a similar size, mass, and body morphology to them,” Benjamin Goldberg, a researcher on the project, told Digital Trends. “Tethered versions of HAMR have previously been shown to run at speeds exceeding 10 body lengths per second and can perform agile turning and dynamic jumping maneuvers. The most exciting development with HAMR-F is that we are now able to take the robot outside of the lab with an onboard battery an electronics, while still maintaining high speeds and maneuverability.”
The ready-to-run robot weighs just 2.8 grams and is powered by an 8-mAh lithium-polymer battery. Eventually, the hope is that it will be able to move autonomously but, right now, it still has to be controlled via a human operator, although this can be carried out wirelessly.
“The application for HAMR-F that we are most excited about is confined environment exploration,” Goldberg continued. “For example, HAMR-F could be used to search for defects within an engine cavity, within a pipe, or behind a wall. Our current version demonstrates really robust tether-free locomotion capabilities — however, many applications would still require sensors such as a camera or other specialized sensing modalities. HAMR-F has a substantial payload carrying capacity of around 50 percent of its own body weight and the circuit boards are compatible with many of these sensors, so hopefully, these types of applications are not far off.”
Goldberg said that the next step for HAMR’s development is to add more exteroceptive sensors, capable of wirelessly transmitting data back to a host machine. “This is a technology that we are very excited about commercializing because we see great potential for cost reduction and automation of some inspection tasks by opening up new pathways in challenging environments and tight spaces,” Goldberg said.
A paper describing the work has been submitted to the journal IEEE Robotics and Automation Letters.



