
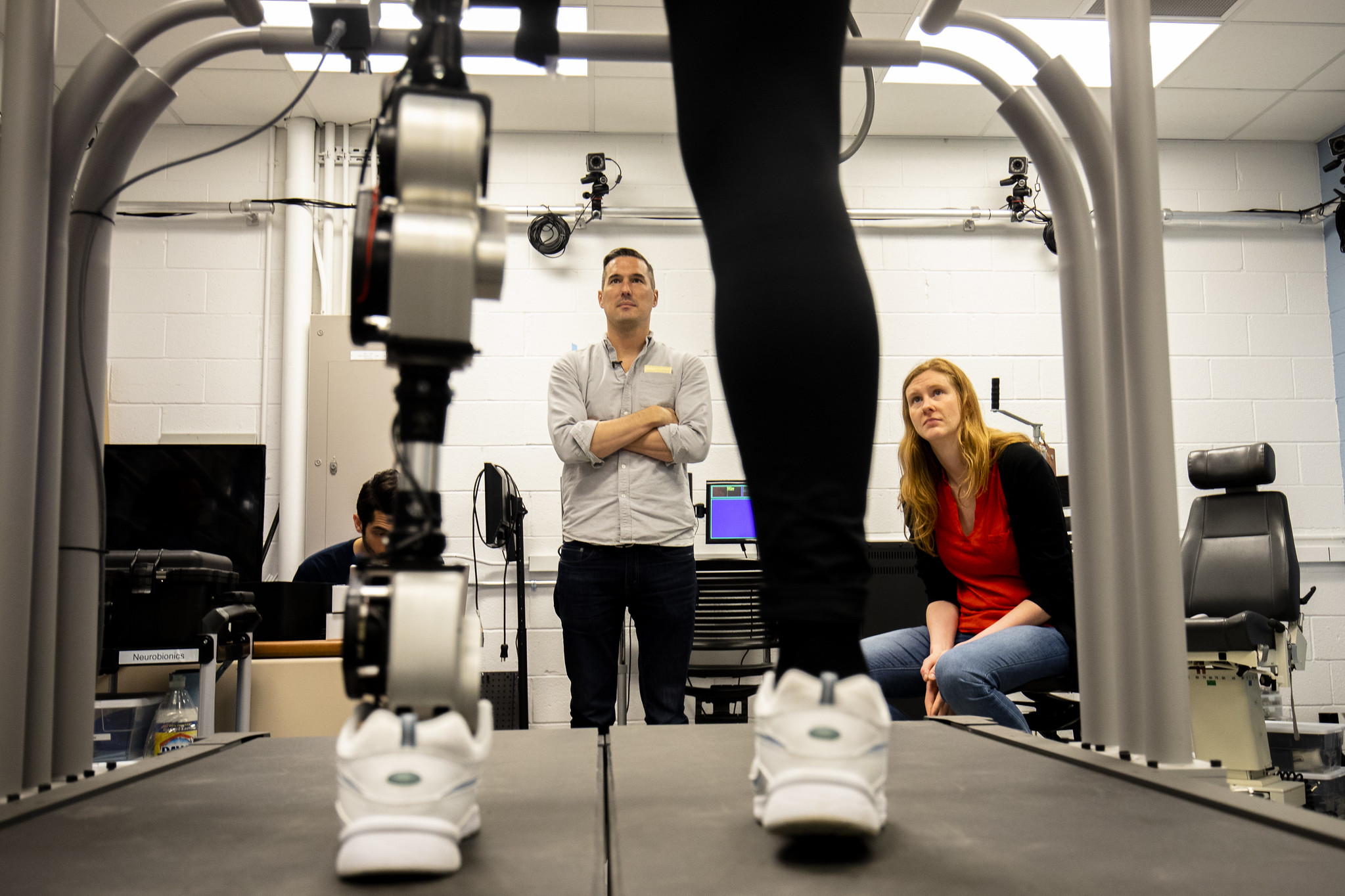
If you wanted to cover a large distance and had the world’s best sprinters at your disposal, would you have them run against each other or work together in a relay? That, in essence, is the problem Elliott Rouse, a biomedical engineer and director of the Neurobionics Lab at the University of Michigan, Ann Arbor, has been grappling with for the best several years.
Rouse, an engineer, is one of many working to develop a control system for bionic legs, artificial limbs that use various signals from the wearer to act and move like biological limbs.
“Probably the biggest challenge to creating a robotic leg is the controller that’s involved, telling them what to do,” Rouse told Digital Trends. “Every time the wearer takes a step, a step needs to be initiated. And when they switch, the leg needs to know their activity has changed and move to accommodate that different activity. If it makes a mistake, the person could get very, very injured — perhaps falling down some stairs, for example. There are talented people around the world studying these control challenges. They invest years of their time and hundreds of thousands of dollars building a robotic leg. It’s the way things have been since this field began.”
Promoting collaboration
Only, according to Rouse, that’s a broken system. It’s understandable that competing high-tech firms hunker down in secrecy when they’re developing the Next Big Thing they hope will sell a gajillion units and add another few hundred billion dollars or more to their market cap. But it’s less understandable when research institutes waste brilliant minds by getting them to solve the same problems that other universities are solving as well. Heck, even once sworn enemies Apple and Google work together when the stakes are high enough.
“The academic system isn’t super good at fostering collaborative research,” Rouse admitted. “As a professor, I have a job to do where I’m measured on certain things like federal funding, grants that are published, and students that I mentor. If you look at the way the academic system establishes the benchmark for faculty in research labs, collaboration is [actually kind of] de-emphasized.”
When it comes to control systems for bionic limbs, the problem is that, in order to even be able to start developing control systems, individual research labs around the world first have to build the underlying hardware. To return to the earlier analogy, that’s worse than, say, Apple and Samsung developing competing smartphones in top-secret; it would be more like Apple and Samsung having to build their own computer operating systems from scratch before starting to design their next-generation smartphone.
This is where Rouse’s project, the Open-Source Leg, comes into play. As the researchers behind it explain on a dedicated webpage: “The overarching purpose of this project is to unite a fragmented field[R]esearch in prosthetic hardware design, prosthetic control, and amputee biomechanics is currently done in silos. Each researcher develops their own robotic leg system on which to test their control strategies or biomechanical hypotheses. This may be successful in the short term since each researcher produces publications and furthers knowledge. However, in the long term, this fragmented research approach hinders results from impacting the lives of individuals with disabilities — culminating in an overarching failure of the field to truly have the impact that motivated it.”
Here comes the bionic leg
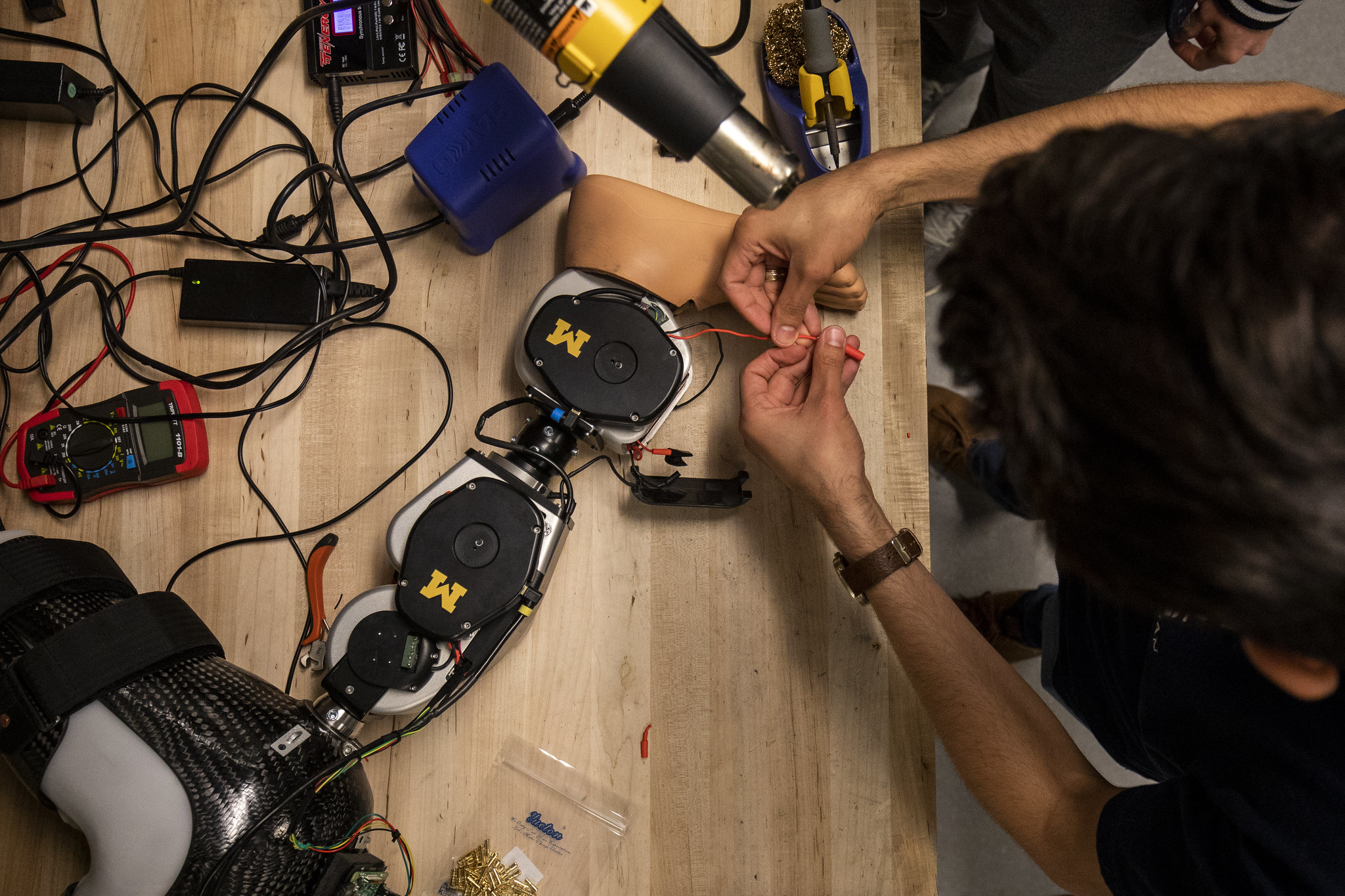
The Open-Source Leg is, as its name suggests, an open-source bionic leg that could become the ubiquitous hardware system for facilitating growth in the area of prostheses control. The design is simple (meaning easily assembled), portable (lightweight and powered by onboard batteries), economical (it costs between $10,000 and $25,000, compared to the $100,000-plus commercially available powered prosthetics), scalable and customizable. Detailed instructions are available online to follow, and Rouse and his colleagues will even build them and ship them out to researchers when creating one themselves is not possible.
In the process, the project seeks to achieve three goals. The first of these is to identify an electromechanical design that can be used for low-cost, high-performance, open-source robotic knee and ankle systems. Secondly, to understand how separate prosthesis control strategies can be combined in order to benefit amputee gait. Finally, the Open-Source Leg project wants to validate its proposed open-source system as a tool for research on prosthesis control. If these research goals can be met, it could turn out to be the game-changer its creators hope it will be.
“In my lifetime, we’re going to see bionic limbs that can use neural information, either on the cortical or peripheral nerve level, to tell us gross movement,” Rouse said. “That will give us control without the need for onboard sensors.” This revolution, he said, is already happening. While fine-grain dexterous movement could take longer than this, it is not necessarily a sci-fi dream that is many lifetimes away from happening.
And if people can figure out how to work together, it could be here a lot quicker.



