Although we’re still in the dead of winter at this point, spring is fast approaching, which means that in just a few short months, you’ll have to venture outside, blow the dust off your lawnmower, and resume the weekly routine of taming your overgrown grass. For some, this is an enjoyable experience, but for others – like George Mason University graduate student Jason Force – it’s a horribly tedious chore.
Frustrated not only by the tedium of mowing his lawn, but also by the wastefulness of sending grass clippings to a landfill, Force decided to build an easier, greener solution.
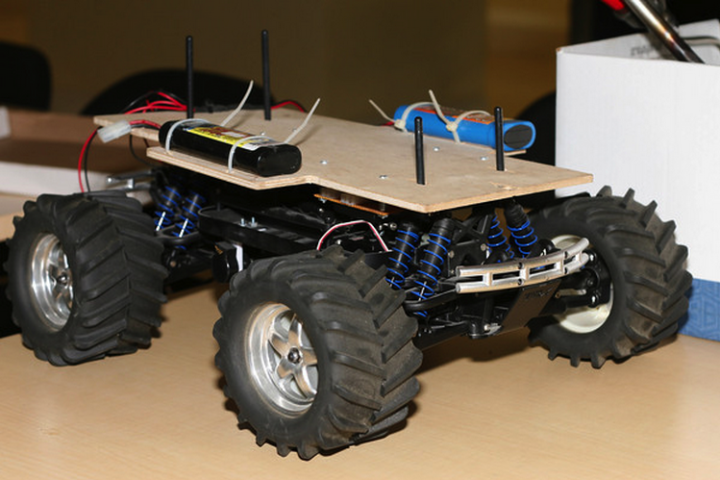
His prototype mower — the EcoMow Harvester — is a self-navigating, self-powered robotic lawn mower that runs on nothing more than the grass clippings it collects from your yard. Built onto the body of an electric hobby truck, the mower is equipped with a small biomass gasifier reactor that converts grass pellets into fuel for the mower. When it trims your grass using it’s low-power non-kinetic electrical bar cutter, the clippings are collected and moved into a “pelletizer,” where high temperatures and pressure are then used to form the grass into dry pellets. From there, these pellets are moved to a small gasifier reactor where they’re converted to synthetic gas. This biomass fuel is then filtered, cooled, and mixed with air before it’s used to power the robot’s small engine.

The device, which Force and his team are currently seeking development funding for, is also equipped with an alternator to collect power for the bot’s other onboard electrical systems. With GPS and proximity sensors, the EcoMow prototype is almost completely autonomous, like a Roomba for your yard.
“You tell it where you want it to mow, press go, and it just goes,” Force said in an interview with the university’s newspaper. “You have to preload some grass pellets into it at the start, but then the machine makes the pellets all by itself.”
Once the design is complete, users will be able to program the device by simply downloading a property overview from Google Maps. They then select the map, overlay it on a picture of their yard, and then input any additional obstacles the mower might encounter. From there, EcoMow’s internal GPS system will locate roads, sidewalks, driveways and other boundaries.
At this point it’s just a prototype, but many of the toughest technical problems have already been ironed out, and Force and his team have applied for a number of different grants to help move development forward. You and I probably won’t be able to own a grass-powered autonomous lawn mower for another couple years, but if you’re interested in learning more about the tech, you can find out more here.
[photo via Melissa Cannarozzi]



