Scaling vertical walls and even hanging from the ceiling: Insects have an incredible ability to maneuver in ways impossible for larger mammals. Now, scientists from the University of Berkeley are taking inspiration from this class of animals to design a fast, agile, tiny robot.
The engineers had already designed a tiny robot that could move very quickly — at up to 20 body lengths per second or 1.5 mph — but they wanted to make it more agile as well. So they looked at the footpads of climbing animals and created a similar system using the principle of electrostatic adhesion. This is the electrostatic effect created when two surfaces are subjected to an electrical field, and it allows the robot to scale difficult obstacles.
Not only that, but the system makes the robot more maneuverable as well. The robot is constructed from layers of a material that bends when subjected to an electrical field, and by adding two footpads which respond to the voltage applied, the robot can rotate rapidly around the “un-stuck” foot. This means the robot can turn super quickly, approaching the maneuvering skills of a real insect.
“Our original robot could move very, very fast, but we could not really control whether the robot went left or right, and a lot of the time it would move randomly, because if there was a slight difference in the manufacturing process — if the robot was not symmetrical — it would veer to one side,” said Liwei Lin, a professor of mechanical engineering at UC Berkeley. “In this work, the major innovation was adding these footpads that allow it to make very, very fast turns.”
You can see the robot scurrying through a Lego maze in the video below:
The footpads also allow the robots to make dramatic adjustments to their path in an agile way comparable to a cheetah:
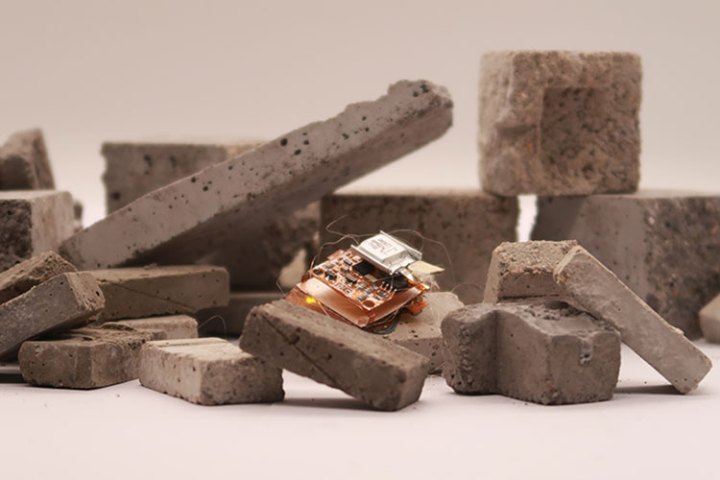
Eventually, robots like this could be used for venturing into dangerous areas in search and rescue operations or entering other hazardous environments such as investigating gas leaks. An advantage of being so small is that the robot can survive considerable crushing forces. The researchers say its design means it could even survive being stepped on by a human weighing 120 pounds.
“One of the biggest challenges today is making smaller scale robots that maintain the power and control of bigger robots,” Lin said. “With larger-scale robots, you can include a big battery and a control system, no problem. But when you try to shrink everything down to a smaller and smaller scale, the weight of those elements becomes difficult for the robot to carry and the robot generally moves very slowly. Our robot is very fast, quite strong, and requires very little power, allowing it to carry sensors and electronics while also carrying a battery.”



